静态3D资产缺乏动力学信息,而真实物理标签的成本又极高——
物理仿真的扩展性该如何实现?
何恺明团队的最新研究提出了一种新的解决方案GeoPT——
GeoPT创新地引入了合成动力学(Synthetic Dynamics),将静态几何提升至动态空间,使模型能在无标签数据中通过学习粒子轨迹演化来获取物理直觉。
在同等精度条件下,GeoPT最多可以减少60%的物理仿真数据需求。
接下来让我们进一步了解这项研究的核心内容。
物理系统通常由几何G(定义空间边界)和系统条件S(动力学驱动因素如速度、力等)共同决定其解场。
例如,在空气动力学中,汽车的形状决定了空间界限,而风速和风向则会影响流体流动及阻力分布的具体情况。
当前研究趋势已从传统的物理仿真转向基于数据驱动的神经网络仿真器。
然而这一转变面临两个主要挑战:
其一是标注成本过高。
使用传统数值求解器生成监督数据,如CFD/FEA等,往往需要耗费大量计算资源(数万CPU小时),这大大限制了仿真器的扩展性。
另一个问题是静态预训练存在局限。
尽管互联网上有大量的3D几何数据可用,但如果只对静态几何进行自监督预训练,则模型无法捕捉到物理仿真的关键特性,甚至可能导致下游任务中的负迁移现象。
为解决上述问题,何恺明团队提出了一种新的预训练范式——动力学提升的几何预训练(Dynamics-lifted Geometric Pre-training)。
其核心在于虽然获取真实的物理标签非常困难,但“动力学”本身是可以参数化的。
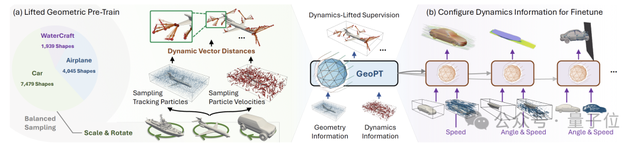
通过在预训练阶段引入合成动力学,GeoPT不仅学习到几何特征,还利用随机速度场v将表征提升至包含几何和动力学的复合空间中。
在此过程中,并不需要真实的物理求解器提供的昂贵动力学数据,而是采用随机采样每个粒子的速度来构建合成速度(Synthetic Velocities):

这使得自监督目标成为基于这些合成动力学轨迹上的几何特征演化过程。

因此,模型可以通过追踪在无标签的大量几何数据上训练的合成动力学轨迹,预先学习物理演化的通用空间约束和耦合规律。
同时,该框架不仅提供了预训练目标,还为下游任务提供了一个统一接口:无论是在预训练还是微调阶段,模型均接收几何与速度作为输入。
在预训练之后,GeoPT能够捕捉到以速度为条件的物理对齐相关性,并通过将动力学条件特化为特定仿真设置并学习求解器生成的数据标签来完成微调至具体任务的过程。
预训练阶段模型被训练预测合成动力学下的几何特征轨迹,其损失函数设计如下:

该目标包含三个核心变量的组合:

几何体从车、飞机、船舶等万余个物体的数据集中进行类别平衡采样。
- 追踪点x从物体周围的空间和边界中随机选择初始位置。
- 速度v则为每个追踪点在有界球体内均匀分配的随机值。
- 给定上述 (G, V) 信息后,轨迹通过公式计算得出,其监督目标是几何特征沿着该路径演化形成的序列。
预训练使得GeoPT捕捉到了以速度为条件的物理对齐相关性,在微调阶段只需将预训练时的随机速度替换为具体任务需求的速度值即可。
在空气动力学中,入射流条件(如速度、攻角等)被编码为Vs,其方向与流向一致。
具体的适配策略如下:
- 对于水动力学,则分别为水和气两相配置不同的Vs以反映船舶阻力仿真中的两相流动特性。
- 碰撞模拟中将冲击力的方向作为Vs输入,并随空间衰减来表示力的传播效果。
- 这种统一接口的设计使得单个预训练模型只需调整速度输入即可适应各种物理仿真的需求。
在具体实现上,研究采用Transolver作为骨干网络并提供了三种不同规模(从3M到15M参数)的模型选项。
数据效率方面,轨迹被离散化为三个步骤,并使用向量距离编码几何信息。每个物体采样大约3.6万个点,并生成约100个随机动力学场。
计算性能上,监督信号通过优化的射线-三角形相交算法计算得出。处理单个样本仅需约0.2秒,远快于工业级 CFD 仿真(百万倍以上)。在80核CPU环境下,仅需要三天即可生成5TB的数据集。
目前该框架已开源,有兴趣的研究者可以参考相关链接获取详细信息。
在预训练阶段使用ShapeNet-V1数据集,涵盖了汽车、飞机和船舶等三类工业相关的几何体,并通过采样生成了超过一百万个样本(约5TB)的数据量。
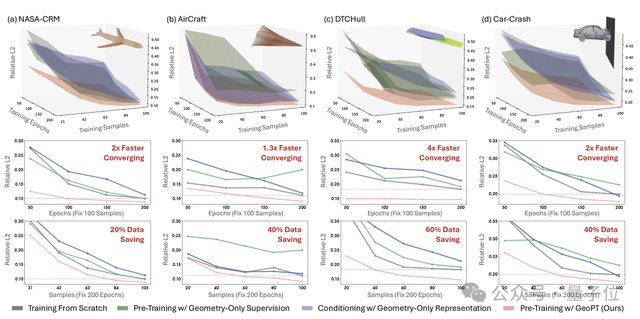
实验任务包括流体力学:如汽车空气动力学 (DrivAerML)、飞机受力分析 (NASA-CRM) 和船舶水动力学 (DTCHull),以及固体力学相关领域,例如汽车碰撞最大应力仿真 (Car-Crash) 和辐射度仿真 (Radiosity)。
实验结果显示GeoPT显著减少了对标注数据的依赖,在达到相同精度的情况下可以节省20-60%的物理仿真数据,并且使微调阶段的收敛速度比从头训练快两倍。
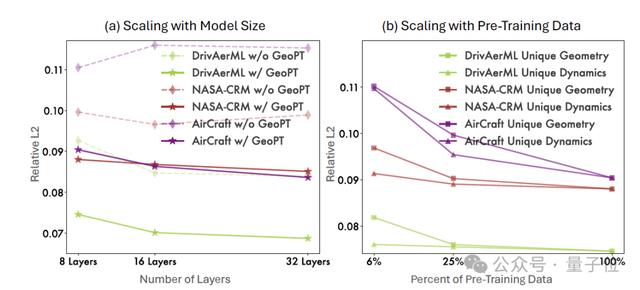
随着模型层数增加(例如从8层到32层)和预训练数据量增大,性能持续提高,展示了“物理大模型”的巨大潜力。
总体来说,论文通过“合成动力学轨迹”进行的预训练方法有效解决了静态几何与复杂动态物理任务之间的差距问题 。
GeoPT为构建广泛的物理仿真基础模型提供了一种可扩展路径:即大规模无标签几何数据结合简单的合成动力学自监督机制能够产生强大的跨领域物理仿真能力。
这项研究的第一作者是来自麻省理工学院CSAIL的博士后研究员吴海旭。
目前他师从Wojciech Matusik教授。在此之前,他在清华大学攻读博士学位,并获得学士学位,导师为龙明盛教授。
龙明盛教授现为清华大学软件学院副教授,也是论文作者之一。
论文的另一位共同第一作者是Minghao Guo,他目前是MIT CSAIL的博士生,同样隶属于Wojciech Matusik教授的研究组。
他在清华大学获得学士学位,并在中文大学取得硕士学位。

此外论文其他作者包括Zongyi Li(何恺明教授的博士后)、MIT博士生Zhiyang (Frank) Dou,以及何恺明和Wojciech Matusik两位教授。
论文的共同第一作者是Minghao Guo,他目前为MIT(CSAIL)博士生,同样师从Wojciech Matusik教授。
他本科就读于清华大学,硕士毕业于香港中文大学。

此外,论文的其他作者还包括Zongyi Li(何恺明教授的博士后)、MIT博士生Zhiyang (Frank) Dou,以及何恺明教授和Wojciech Matusik教授。
参考链接
[1]https://arxiv.org/abs/2602.20399v1
[2]https://github.com/Physics-Scaling/GeoPT
— 完 —
量子位 QbitAI · 头条号签约
关注我们,第一时间获知前沿科技动态